项目经历介绍
1. 长距离骑行路径规划应用1.1 绘制地图瓦片1.2 调整绘图精度1.3 地图瓦片的缓存机制1.4 降低搜索空间大小1.5 利用 k-d 树搜索临近结点1.6 基于 A* 搜索 改进的近似算法1.7 搜索结果导出2. 利用随机局部搜索算法解决旅行推销员问题3. 利用遗传算法解决航班编排问题
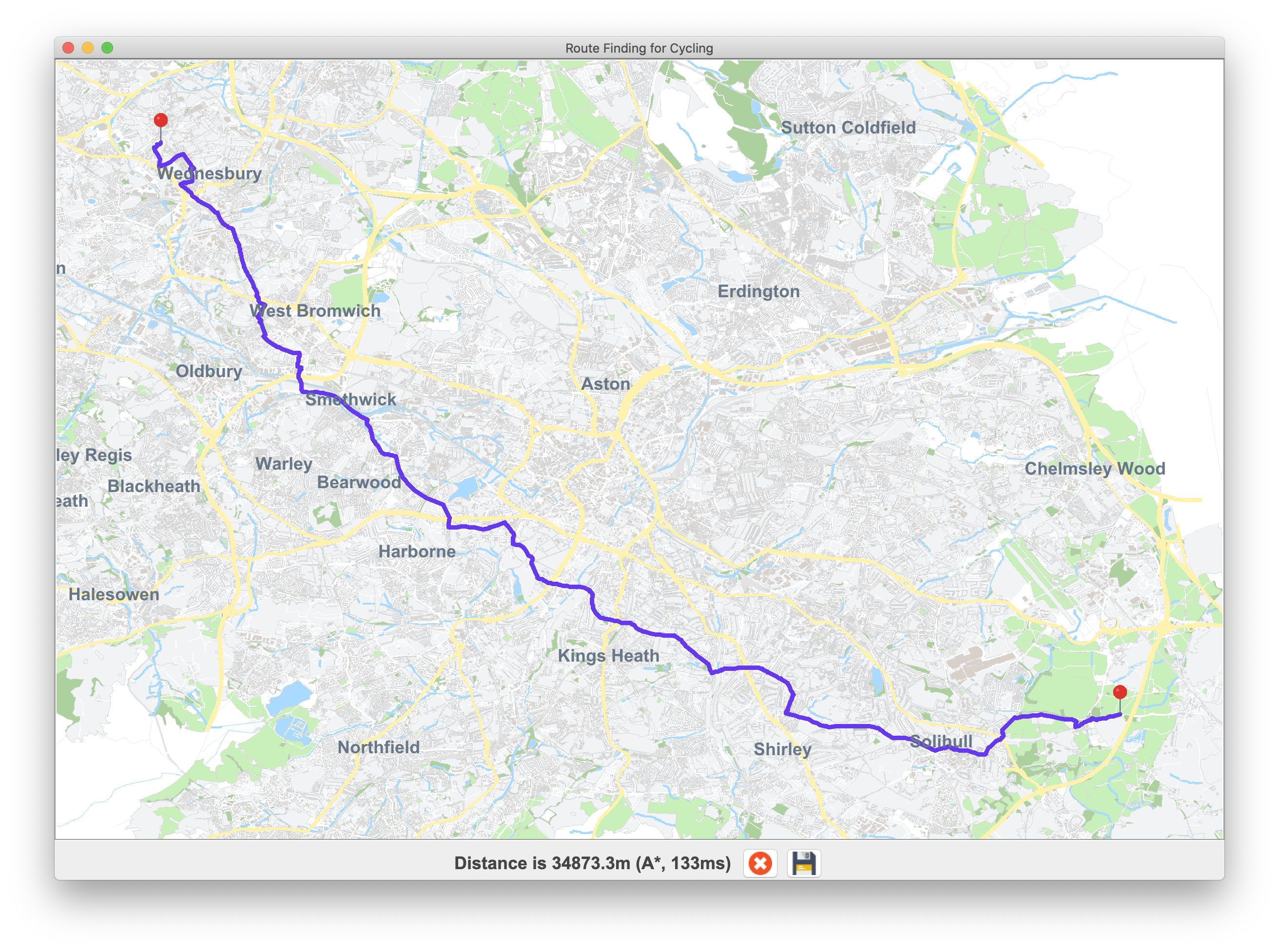
1. 长距离骑行路径规划应用
Java, Swing, Graphics2D, OpenStreetMap
基于OpenStreetMap开源地图数据,绘制地图瓦片,实现多级瓦片地图交互系统,动态显示地图。构建路网用于路径搜索,根据用户提供的起始点搜索路径,并能将路径结果导出至GPS设备。
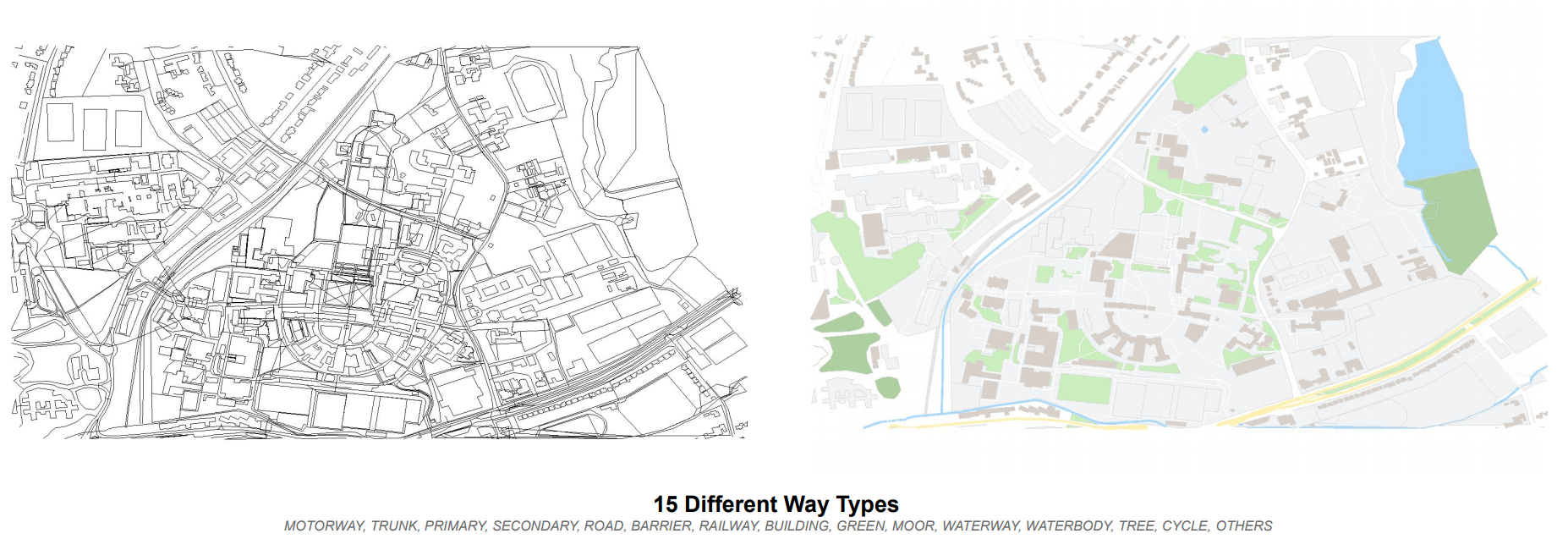
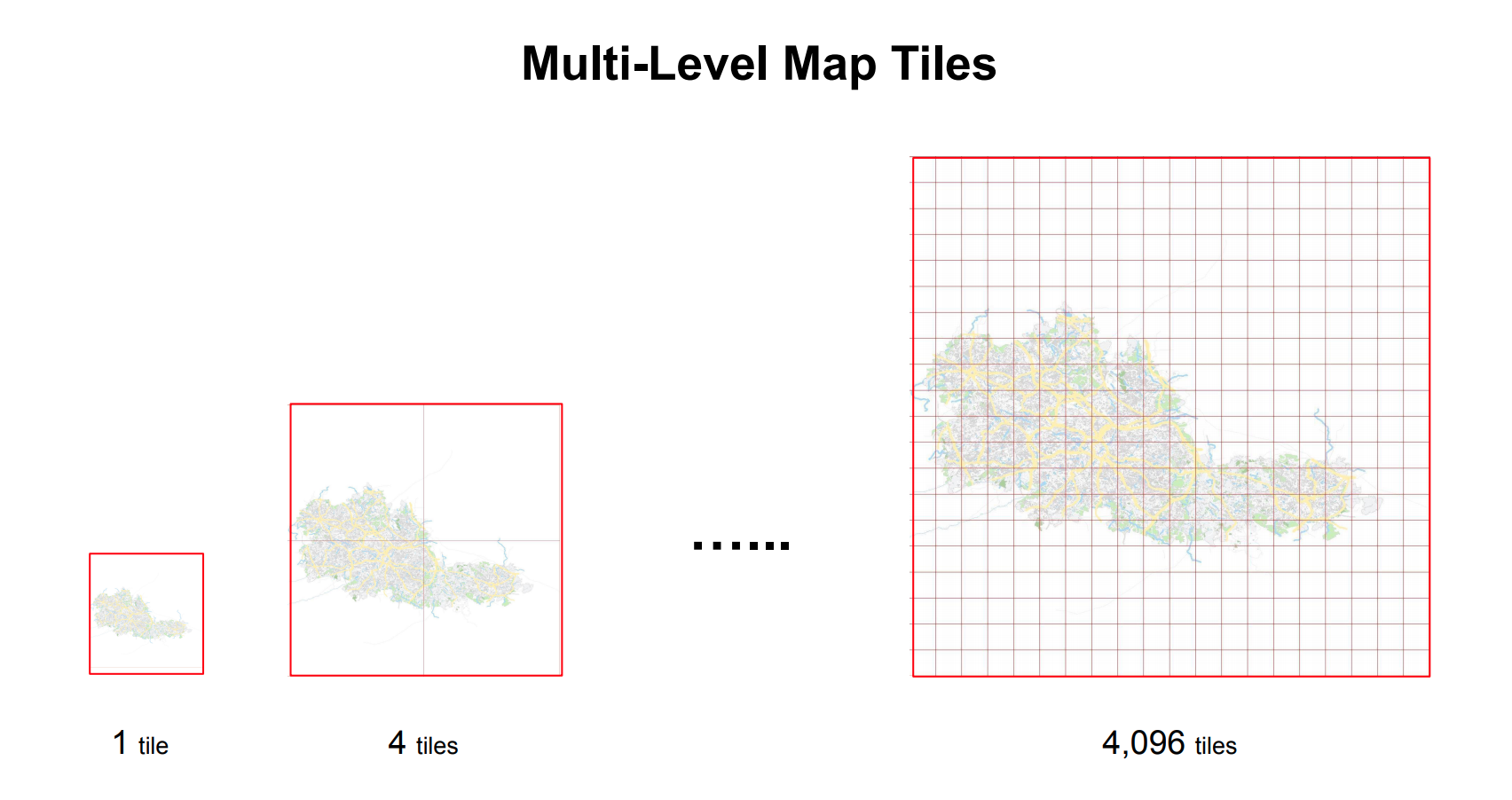
1.1 绘制地图瓦片
基于OpenStreetMap开源地图数据,绘制地图瓦片。查看一个地图数据的样例。

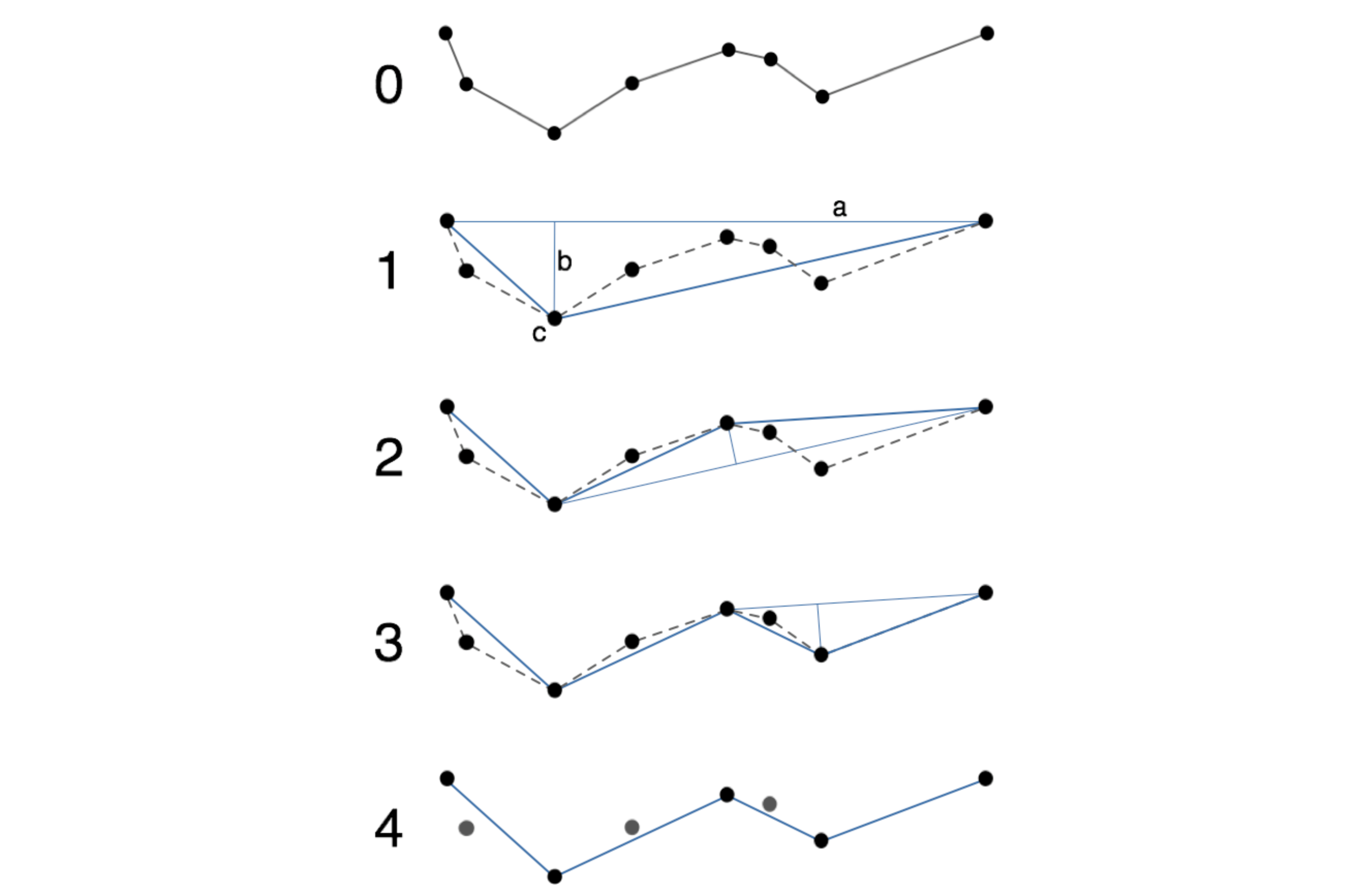
1.2 调整绘图精度
针对地图的不同缩放级别,利用Douglas–Peucker算法调整绘图的精细度,从而加速地图瓦片的绘制速度。
1.3 地图瓦片的缓存机制
呈现地图时,为地图瓦片设计LRU缓存机制和预加载机制,降低I/O操作频率,提高应用响应速度。
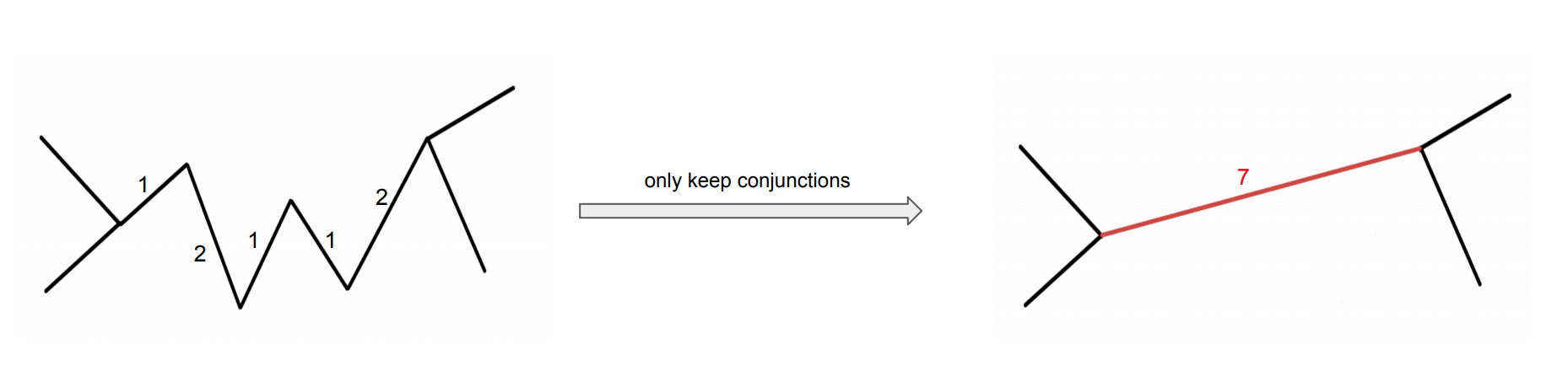
1.4 降低搜索空间大小
压缩路网非岔路结点,将搜索空间降低约50%,减少了因搜索无效结点造成的时间浪费。
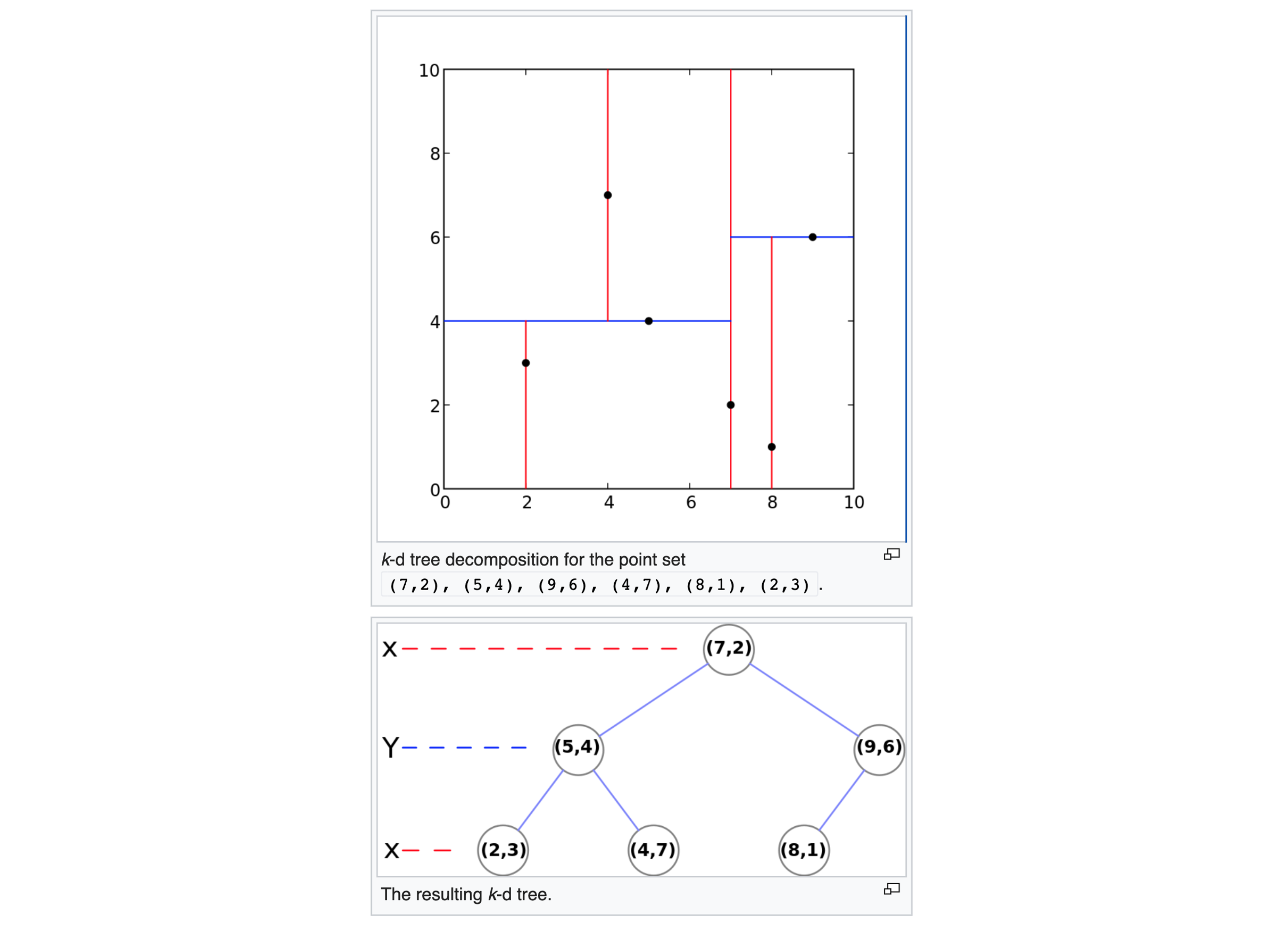
1.5 利用 k-d 树搜索临近结点
利用k-d树搜索二维路网的最近结点,将搜索时间复杂度从O(N)降至O(logN)
1.6 基于 A* 搜索 改进的近似算法
传统 A* 搜索算法的目标为寻找最优路线,依照优先级选择下一个访问点,优先级的计算方式为:
其中:
- 是结点
n的总优先级 - 是从起始点到结点
n的成本 - 是结点
n到目标结点的预估成本
项目中 被选定为结点 n 到目标结点的直线距离,此时预估距离小于等于实际最短距离,一定能找出全程最短路径。
通过将 增大到超过实际最短距离(可通过乘上一个固定的系数实现),可将算法变为近似算法。本项目中, 在增大到 1.5 倍时,搜索速度平均提升了约15倍,与最优路径平均偏差约4%
1.7 搜索结果导出
可将搜索结果导出为GPX文件,并导入至GPS设备中使用
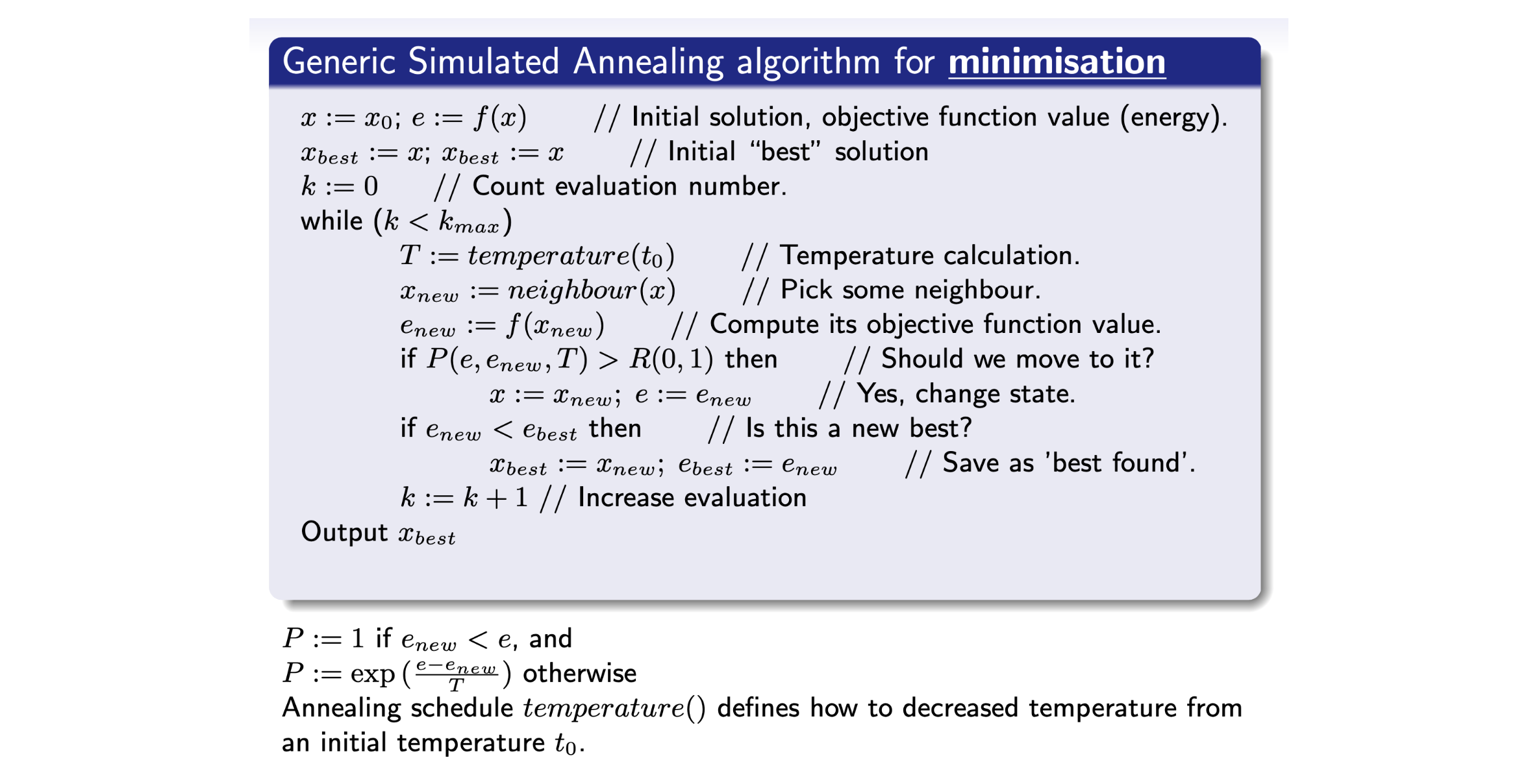
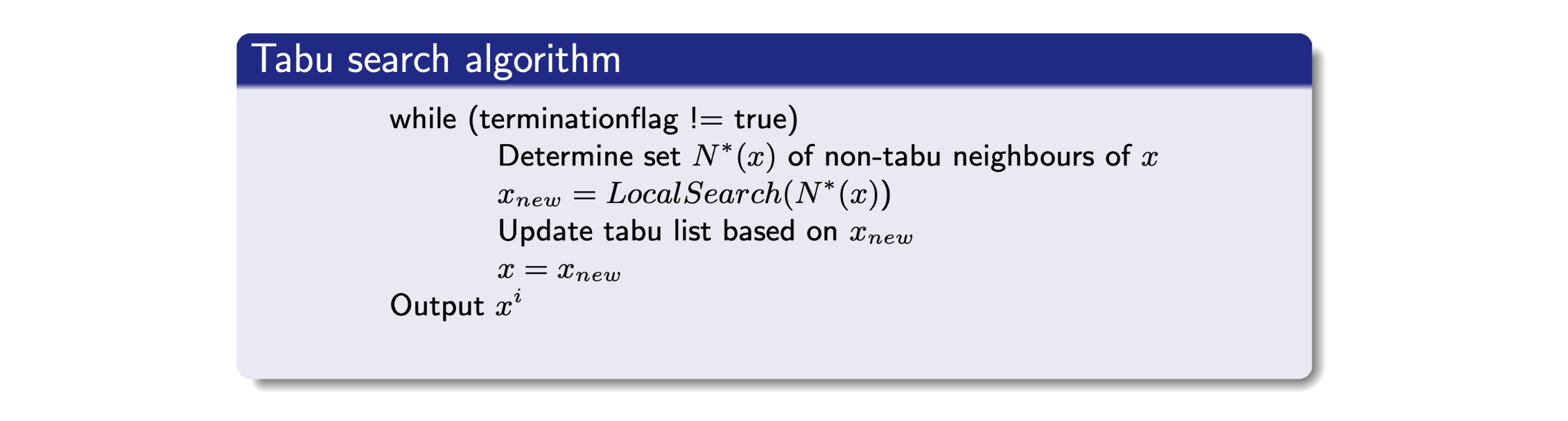
2. 利用随机局部搜索算法解决旅行推销员问题
目标:给定一系列城市和每对城市之间的距离,求解访问每一座城市一次并回到起始城市的最短回路。
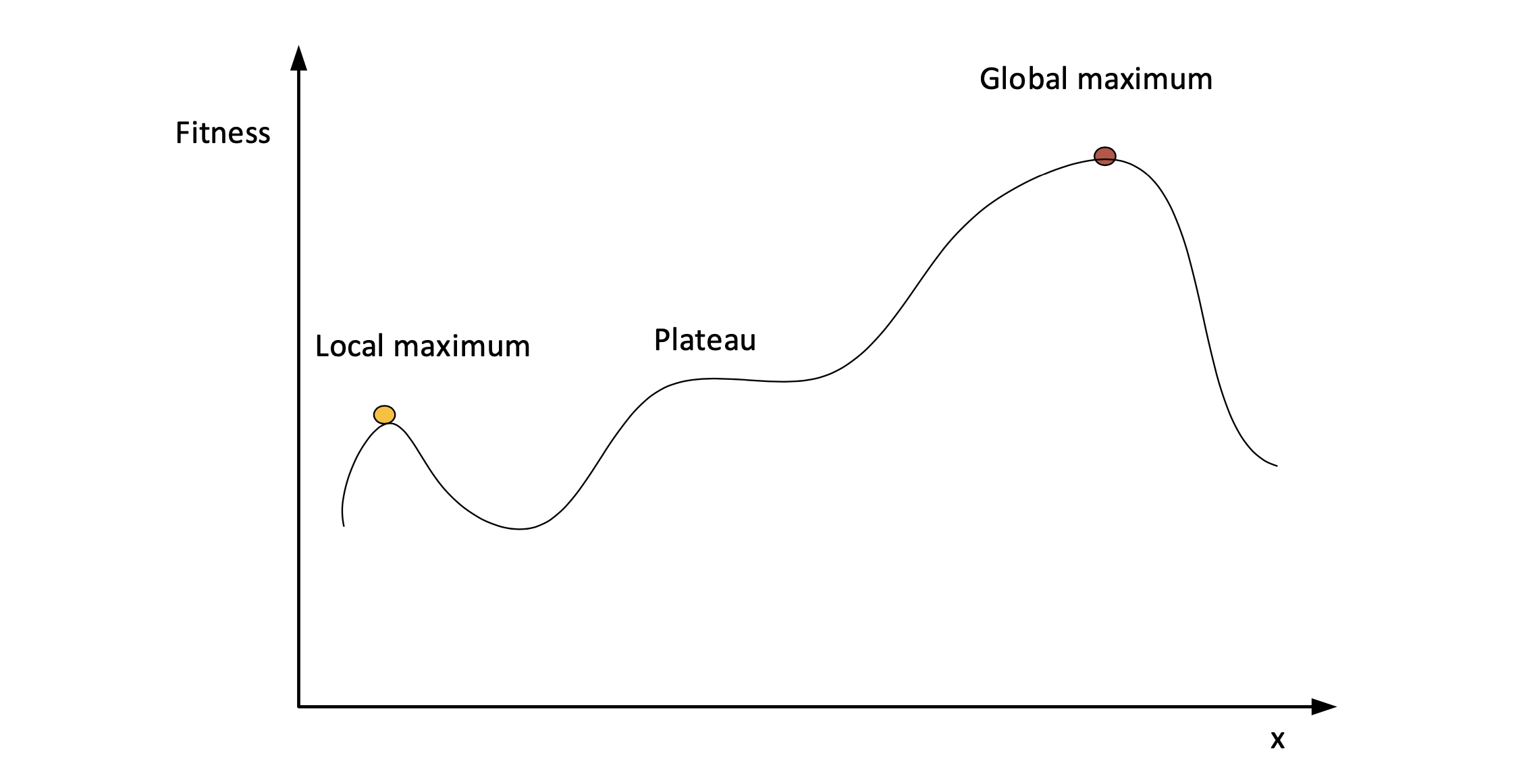
- 问题复杂度为 O(N!),无法在有限时间内得到最优解,可利用随机局部搜索算法获得次优解
- 使用模拟退火和禁忌搜索算法优化局部搜索,避开局部最优陷阱,所得结果与最优解偏差约 1%
3. 利用遗传算法解决航班编排问题

目标:在给定的航线集合中,选出最优航线子集,使得所有航段被覆盖一次且总费用最优。该问题属于集合覆盖问题,是NP完全问题。
- 针对杂交变异后生成的子代变为不可行解的问题,应用启发式改进算法(参考文献 [1],p331 Algorithm 1),使其符合或接近条件限制
- 在子代种群排序时应用 Stochastic ranking 算法(参考文献 [2],P5),引入随机因子,以一定概率提高不可行解的存活率,保证候选种群的多样化
测试数据
http://people.brunel.ac.uk/~mastjjb/jeb/orlib/files/sppnw41.txt
http://people.brunel.ac.uk/~mastjjb/jeb/orlib/files/sppnw42.txt
http://people.brunel.ac.uk/~mastjjb/jeb/orlib/files/sppnw43.txt
参考文献
[1] P.C. Chu, J.E. Beasley, Constraint Handling in Genetic Algorithms: The Set Partitioning Problem, Journal of Heuristics, 11: 323–357 (1998). 查看论文
[2] T.P. Runarsson, X. Yao Stochastic ranking for constrained evolutionary optimization, IEEE Trans. on Evolutionary Computation, 4(3): 284-294 (2000). 查看论文